Appearance
18.1.2 线性规划基本概念、规范形
现在考虑线性规划问题(18.5a,18.5b),相应的可行集为
18.1.2.1 极端点和基
1. 极端点的定义
点
即
2. 关于极端点的定理
如果矩阵
如果
3. 基
对于每一个极端点,可以选定矩阵
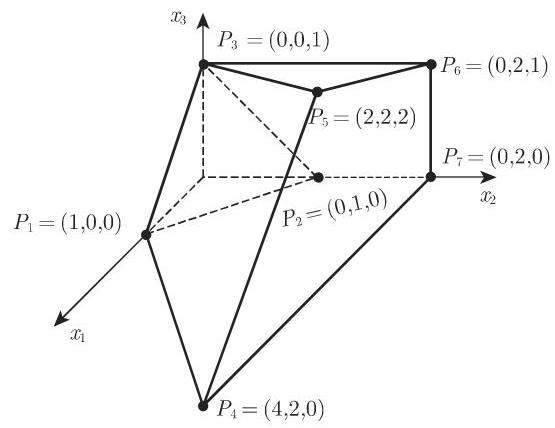
由约束条件确定的可行集示于图 18.4. 引入松弛变量
多面体的极端点
注 这里第一个不等式带不等号 “
4. 目标函数取极大值的极端点
定理 如果
于是线性规划问题的求解就是至少确定一个极端点使得目标函数在其上达到极大值. 通常在实际问题中, 极端点的数目是非常大的, 从而需要有一种方法能够在合理的时间内找到答案. 这样的方法就是单纯形法, 也称作单纯形算法或单纯形程序.
18.1.2.2 线性规划问题的规范形
1. 规范形和基本解
线性规划问题 (18.4a, 18.4b) 总能通过适当的变量重新排序转换成如下形式:
OF :
CT:
系数矩阵的最后
如果
2. 规范形的确定
如果
矩阵
OF:
CT:
注 如果原始系统 (18.1b) 仅有 “
从