Appearance
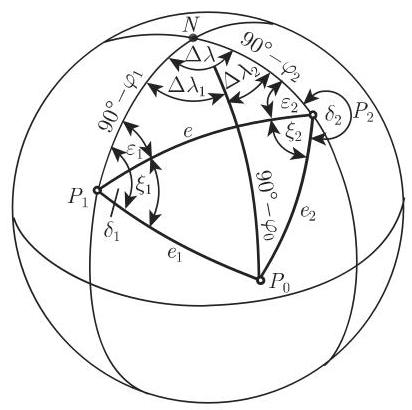
3.4.3 球面三角形的计算
3.4.3.1 基本问题、精度评估
这里所谓的基本问题是指球面三角形计算中最常出现的各种情形. 对于锐角球面三角形来说, 有好几种方法去求解每个基本问题, 这取决于计算是否仅基于公式 (3.187a) 至 (3.191b), 或者还基于公式 (3.192a) 至 (3.201), 以及只求该三角形的一个量还是多个量.
包含正切函数的公式在数值上可以得到更精确的结果, 尤其是相比于该数值接近于
3.4.3.2 直角球面三角形
1. 专门公式
在直角球面三角形中至少有一个角是
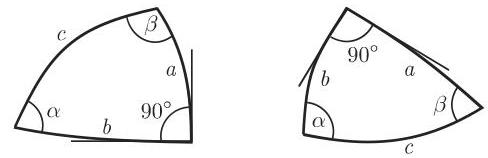
如果在一些问题中给定了其他的边或角,例如量
基本问题 | 已知的确定量 | 确定其余的量所需公式的编号 |
(1) | 斜边和一直角边 | |
(2) | 两直角边 | |
(3) | 斜边和一个角 | |
(4) | 一直角边和其上的角 | |
(5) | 一直角边和其所对的角 | |
(6) | 两个角 |
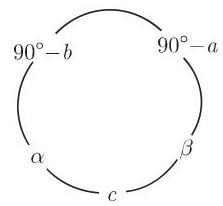
2. 纳皮尔法则
等式 (3.202a)-(3.202j) 可以概括成纳皮尔法则. 如果一个直角球面三角形的五个确定的量 (不算直角) 按它们在三角形中同样的顺序沿一个圆排列, 并将直角边替换为它们的余角
(1)每个确定的量的余弦等于其相邻的量的余切值之积.
(2)每个确定的量的余弦等于其不相邻的量的正弦值之积.
解 球面上的一点
在
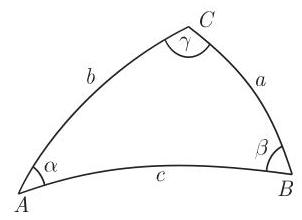
3.4.3.3 斜球面三角形
对于三个已知量, 要区分出六个基本问题, 正如在直角球面三角形时所做的那样. 角的记号是
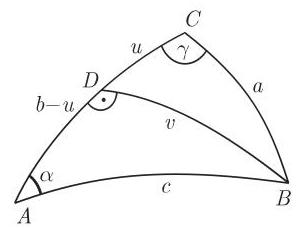
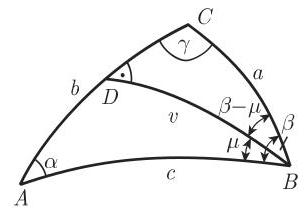
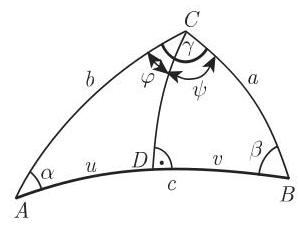
表 3.9~表 3.12 对应该用哪些公式来确定六个基本问题情形中的量进行了汇总. 问题 3 问题 6 也可以通过将一般三角形分解为两个直角三角形来解. 为此对于问题 3 和问题 4 (图 3.100,图 3.101) 可以使用从
第一基本问题 SSS 已知: 3 边 | 第二基本问题 WWW 已知: 3 角 |
条件: | 条件: |
解 1: 求 | 解 1: 求 |
解 2: 求 | 解 2: 求 |
第三基本问题 已知: 2 边及其夹角,例如, | |
条件: 无 | |
解 1: 求 | |
在表 3.9 至表 3.12 的表头中,已知边和已知角分别用
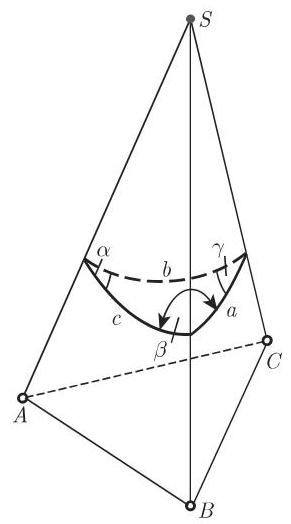
A 四面体 一个四面体具有底
解 从围绕该棱锥顶点
侧面之间的夹角就是球面三角形的三个角, 所求棱之间的夹角是球面三角形的边. 确定角
解 1: 求
解 4: 求
解 2: 求
解 3: 求
检验: 关于
第五基本问题 SS 已知: 2 边和其中之一 所对的角,例如, | 已知: 2 角和其中之一 所对的边,例如 |
条件: 见分情况讨论. | 条件: 见分情况讨论. |
解: 所求为任何缺失的量. | 解: 所求为任何缺失的量. |
分情况讨论: | 分情况讨论: |
|
|
3.1.1. | 3.1.1. |
3.1.2. | 3.1.2. |
3.2. | 3.2. |
3.2.1. | 3.2.1. |
3.2.2. | |
用一个角或用两个角 | 用一条边或用两条边 |
方法 2
检验: 关于
(1) 三角形
(2) 三角形
(3) 三角形
3.4.3.4 球面曲线
球面三角学在航海中有非常重要的应用. 一个基本问题是确定航向角, 它给出最优的航线. 其他的应用领域是大地勘测以及机器人运动设计.
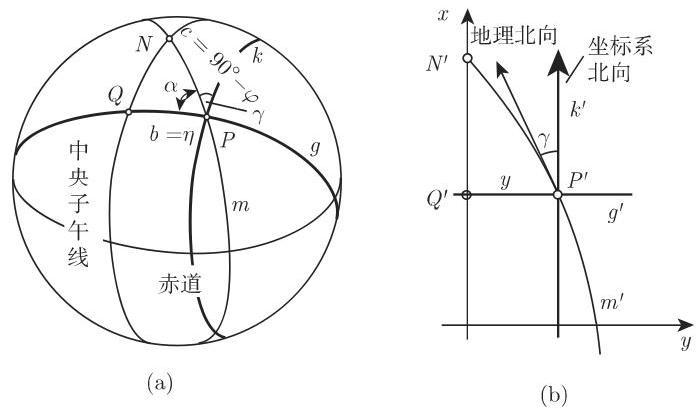
1. 大圆航线
(1) 概念 球表面的测地线 - 它是曲线,是连接
(2) 大圆航线的方程 沿大圆航线 - 除子午线和赤道外 - 运动需要航向角的连续变化. 这些具有与位置有关的航向角
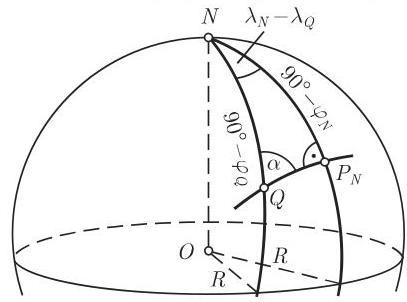
最接近北极的点 在点
和
评论 如果计算出来的地理距离
这称为角在定义域内的简化.
与赤道的交点 大圆航线与赤道的交点
评论 在某些情形中需要根据 (3.205) 来做角的简化.
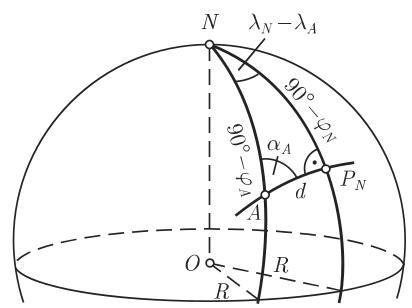
(3) 弧长 如果大圆航线通过点
要是考虑地球半径
(4) 航向角 使用边的正弦定律和余弦定律计算
评论 利用公式 (3.207a),(3.208),(3.204a) 和 (3.204b),对于由两点
(5) 与平行圆的交点 关于大圆航线与平行圆
从对两个交角
对于最小的航向角
评论 1 (3.209) 的解仅当
评论 2 在某些情形中需要根据 (3.205) 进行角的简化.
(6) 与子午线的交点 根据 (3.203),大圆航线与子午线
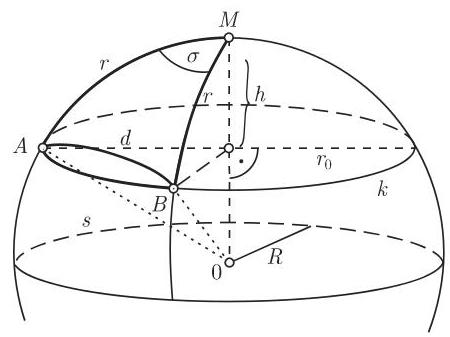
2. 小圆
(1) 概念 这里, 需要比在第 213 页 3.4.1.1 中更加精确的球面上小圆的定义: 小圆是球面上与固定点
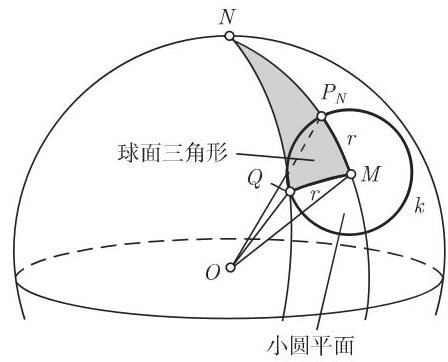
小圆平面是高为
(2) 小圆的方程 作为定义参数,要么使用
因为
(3) 弧长 小圆
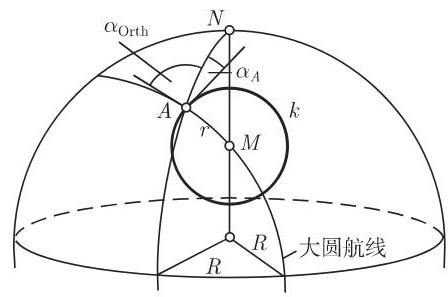
(4) 航向角 根据图 3.109,通过
因此,我们得到所求的小圆在点
(5) 与平行圆的交点 关于小圆与平行圆
评论 在某些情形中需要根据 (3.205) 进行角的简化.
(6) 切点 在切点
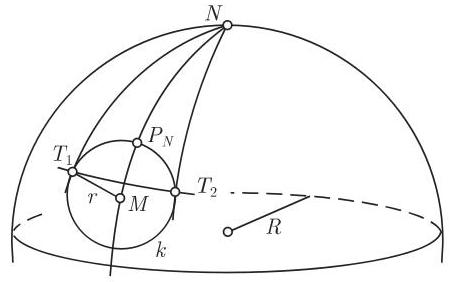
评论 在某些情形中需要根据 (3.205) 进行角的简化.
(7) 与子午线的交点 小圆与子午线
来计算, 其中用到了以下记号:
一般来说,对于
如果
3. 斜航线
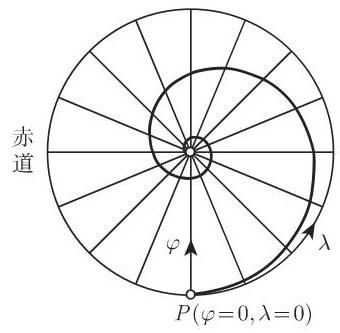
(1) 概念 以相同航向角与所有子午线相交的一条球面曲线称为斜航线或球面螺旋线. 因此纬线
(2) 斜航线的方程 图 3.111 显示的是以航向角
考虑到斜航线必须通过点
特别当
评论 可以利用 (3.224) 计算
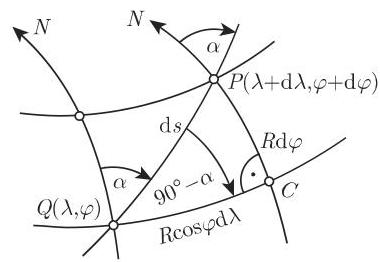
(3) 弧长 从图 3.111 我们可以看出微分关系
关于
如果
近似公式 根据图 3.111,设
(4) 航向角 根据 (3.219b) 和 (3.219c),对于通过点
(5) 与平行圆的交点 假设斜航线以航向角
利用 (3.223) 计算与赤道的交点
评论 在某些情形中需要根据 (3.205) 进行角的简化.
(6) 与子午线的交点 斜航线——除平行圆和子午线外——以螺旋形环绕极点 (图 3.112). 以航向角
如果
4. 球面曲线的交点
(1)两条大圆航线的交点 假设所考虑的大圆航线具有最接近北极的点
消去
方程 (3.228) 在地理经度的取值范围
交点
(2) 两条斜航线的交点 假设所考虑的斜航线具有赤道交点
消去
相应的地理经度
评论 在某些情形中需要根据 (3.205) 进行角的简化.